DenseNet
This is a Pytorch implementation of the Densely Connected Convolutional Networks paper.
The researchers behind DenseNet improve upon Residual Networks by implementing shortcut connections between every layer in the Dense Block.
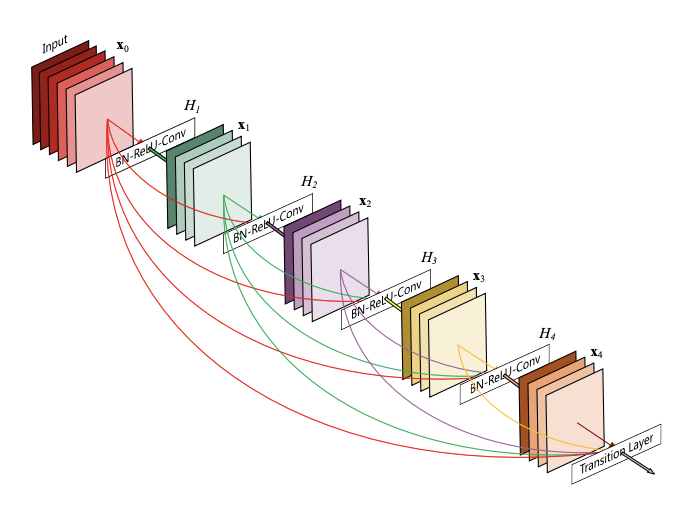
The idea is to concatenate the feature maps of all the preceding layers with the result of the current layer instead of performing element-wise addition like ResNet. The authors argue that the element-wise summation used in Residual Networks may actually impede the flow of information and emperically prove that DenseNets perform better overall.
The concatenation can be represented as
$$x_l = H_l([x_0,x_1,\dots,x_{l-1}]).$$
The feature map of layer \(l\) will return \(x_l\), which is the result of convolutions of the concatenations of all previous layers. The next layer will then perform convolutions on \([x_0,x_1,\dots,x_{l-1},x_{l}]\)
import torch
import torch.nn as nn
from torchinfo import summaryA Dense Layer
A dense layer contains convolutional operations and a single concatenation. Several dense layers make up a dense block.
class DenseLayer(nn.Module):Parameters
input_channels: input number of channels
growth_rate: the growth rate of the dense network (number of output channels per dense layer)
def __init__(self, input_channels, growth_rate): super(DenseLayer, self).__init__()
self.growth_rate = growth_rate
self.layer = nn.Sequential(First batch normalization
nn.BatchNorm2d(input_channels),First ReLU
nn.ReLU(),\(1 \times 1\) convolutional layer to apply bottleneck (expansion set at 4)
nn.Conv2d(in_channels=input_channels, out_channels=4*input_channels, kernel_size=1, stride=1, padding=0, bias=False),Second batch normalization
nn.BatchNorm2d(4*input_channels),Second ReLU
nn.ReLU(),\(3 \times 3\) convolutional layer that maps number of channels to the growth_rate.
Because each dense layer maps outputs of growth_rate number of channels, each concatenation
increases the channel length by growth_rate amount, hence the name.
nn.Conv2d(in_channels=4*input_channels, out_channels=growth_rate, kernel_size=3, stride=1, padding=1, bias=False)
)Propagate
def forward(self,x):
z = self.layer(x)Concatenate the output and the input along the y-axis (1)
z = torch.cat([z, x], 1)
return zTransition Layer
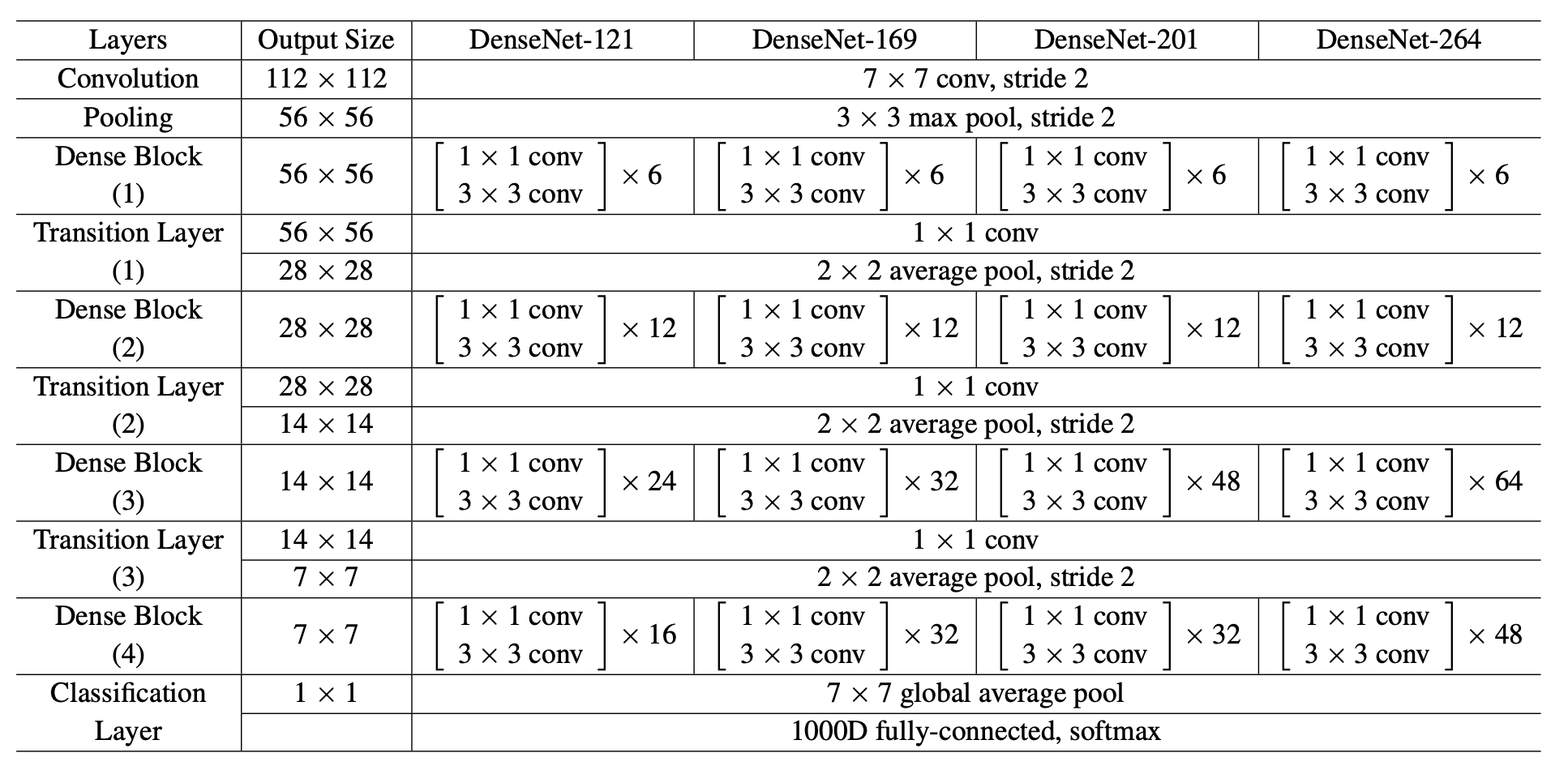
To prevent the model from having an overly large number of channels, DenseNet performs compression via Transition Layers.
Assuming a dense block returns \(m\) feature maps, the transition layer performs compression to \(\lfloor \theta m \rfloor\) feature maps. When \(\theta = 1\), the number of feature maps remain unchanged.
The authors of the paper use \(\theta = 0.5\) in their experiments.
class TransitionLayer(nn.Module): def __init__(self, input_channels, theta=0.5): super(TransitionLayer, self).__init__()self.input_channels == m
self.input_channels = input_channelsCompressed number of feature maps
self.output_channels = int(input_channels*theta)
self.layer = nn.Sequential(Batch normalization
nn.BatchNorm2d(self.input_channels),\(1 \times 1\) convolution to map number of feature maps to m
nn.Conv2d(in_channels=self.input_channels, out_channels=self.output_channels, kernel_size=1, stride=1, padding=0, bias=False),Average Pool to halve input width and height
nn.AvgPool2d(kernel_size=2, stride=2, padding=0)
)Propagate
def forward(self,x):
return self.layer(x)Return the output number of channels
def output_channels_num(self):
return self.output_channelsDenseNet Model
class DenseNet(nn.Module):Parameters
architecture: List of int, where each int represents how many times to repeat a dense layer for each block
input_width: the width of the input image
output_num: the number of classes
growth_rate: the growth rate of number of feature maps
def __init__(self, architecture, input_width, output_num, growth_rate=32): super(DenseNet, self).__init__()
self.architecture = architecture
self.input_width = input_width
self.output_num = output_num
self.growth_rate = growth_rateThe preliminary layer of Conv2d -> Batch Normalization -> ReLU -> Max Pool. The resulting number of channels is double the growth rate.
self.initial = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=self.growth_rate*2, kernel_size=7, stride=2, padding=3, bias=False),
nn.BatchNorm2d(self.growth_rate*2),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)Dense Blocks
input_channels keeps track of the number of feature maps
input_channels = self.growth_rate*2First dense block
self.dense_block1, input_channels = self.create_dense_block(input_channels, architecture[0])First transition layer
self.transition_layer1 = TransitionLayer(input_channels)Update number of feature maps
input_channels = self.transition_layer1.output_channels_num()Second dense block
self.dense_block2, input_channels = self.create_dense_block(input_channels, architecture[1])Second transition layer
self.transition_layer2 = TransitionLayer(input_channels)Update number of feature maps
input_channels = self.transition_layer2.output_channels_num()Third dense block
self.dense_block3, input_channels = self.create_dense_block(input_channels, architecture[2])Third transition layer
self.transition_layer3 = TransitionLayer(input_channels)Update number of feature maps
input_channels = self.transition_layer3.output_channels_num()Fourth dense block
self.dense_block4, input_channels = self.create_dense_block(input_channels, architecture[3])Classification layer consisting of Avg Pool -> Flatten -> FC -> Softmax
self.avgpool = nn.AvgPool2d(kernel_size=int(input_width/(2**5)))
self.flatten = nn.Flatten()
self.fc = nn.Linear(in_features=1*1*input_channels, out_features=output_num, bias=False)
self.softmax = nn.Softmax(dim=1)Propagate
def forward(self, x):
z = self.initial(x)
z = self.dense_block1(z)
z = self.transition_layer1(z)
z = self.dense_block2(z)
z = self.transition_layer2(z)
z = self.dense_block3(z)
z = self.transition_layer3(z)
z = self.dense_block4(z)
z = self.avgpool(z)
z = self.flatten(z)
z = self.fc(z)
return self.softmax(z)Create a dense block
def create_dense_block(self, input_channels, repetition_num):Parameters
input_channels: number of input feature maps
repetition_num: number of times to repeat the dense layer
Return
nn.Sequential(*layers): Sequence of layers in the whole residual block
in_channels: number of output channels
layers = []
in_channels = input_channels
for _ in range(repetition_num):
layers.append(DenseLayer(in_channels, self.growth_rate))For each iteration, the number of channels increase by growth_rate amount
in_channels += self.growth_rate
return nn.Sequential(*layers), in_channelsTensor Test
if __name__ == "__main__":Sample tensor simulating one training instance from ImageNet
test = torch.rand(1,3,224,224)DenseNet-121
model = DenseNet([6,12,24,16],224,1000)Size output: (1,1000)
print(model(test).size())